��ӆΏ��x
�l���r�g��2017-12-25 11:54
�S���ƌW���g�İlչ�҇�һЩ��I�����������a�ļ����yԇ�x�������M�����҇�����������������ҽ����Ѓx�����ڇ������������^�õ��������������Cе�Y�����M�ĸ��ӷ������w���̡����^���s������ƽY��Ҳ��ģ�M�·�D���˔����·---�ΰ�C���Ƭ�C��������҇������x�����^��������ǰlչ�ܿ����������ڼ����x���Č��I�ԡ������Ժ����������̫���������֮���a�S�̵ļ��g���ܵȷ�������ԭ�Ķ������˺ܶ��I����ʿ�е����g�Y�υT���������S���y�������ᘌ�����ԭ���Ҫ������һ������䌍�M�ڃx���S��;��Ҳ������ͬ��
��ӆΏ��x�Y��Ҫ�c����������ԭ����
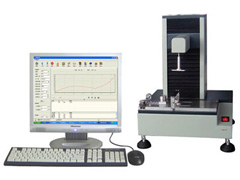
��ӆΏ��x�oՓ����̖���������^������ͬ���������N�Y���M�ɾ�������ͬ����Ҫ����ԇ�ӊA�ּ�����ι��ϵ�y���������L�y��ϵ�y������ƄӊA�����Ӽ��ٶȿ���ϵ�y�����yԇ�Y��̎���@ʾ��ݔ��ϵ�y���yԇ�l��ݔ��ϵ�y�ȽM���������ϵ�y�ȽM�ɣ����������Դ��������������ӿ��c̎�����m��������������ϵ�y����һ����ͬһ̎�����f�{��ɣ���ϵ�y��Pϵ��D1��ʾ��
1������ԇ�ӊA��ϵ�y���ɶ������Ӷ��A�����M�ɣ�ͨ�����A����ֱ�ӻ��g���c�y����������������ӊA�������O��Ҫ����ٶȾ����Ƅӣ�ȫ�Ԅ�ʽ��ӆΏ��x���t��A��ԇ�ӄ����ܿ����·�m�r��ɣ��������ԇ�Ӳ��A������������Ó������Ҫ���gҪ��֮һ������
2���y��ϵ�y�������y�����������y���·��A/D�D�Q���������书���nj�ԇ������������ֵģ�M��̖�D�Q�������Ĕ������������Ա�ͨ�^�ӿڹ�̎������CPU�����Mһ��̎��������ֵ��Փ�`����ԣ���A/D�D�Q���Ǒ���Ҫ�Pע�ļ��gָ���������
3��������L�y��ϵ�y��������ӆΏ��x����CRE������ʽ����������A����λ�ƻ������Ժ��Բ�Ӌ������ʙz�y�����^���ЄӊA������λ������ҕ��ԇ�ӵ����L�������������Y��������ԭ�������һ��ɷ֞����D�Qʽ��CPUݔ���}�_Ӌ��ʽ�ɷN��������߸��Ѓ�ȱ�c�����Ȼ�cܛ���ľ�������λ�b�õIJ��������g���Pϵ�����
4���A�����Ӽ��ٶȿ���ϵ�y�����ȳ����ӷ�ʽ�����A������M늙C�������Bֱ��늙C������C����늙C�ӡ��oՓ����ӷ�ʽ����������ٶ�׃�Q�������·���������׃�ٙC����������wҪ�]��������ָ�ˣ��{��׃�ٷ������ٶȷ����������ͣ푑���������ݔ������һ���ԣ��������������Y�����s�̶ȵ���DZ��ע��Ć��}������
5���yԇ�Y��̎����ݔ��ϵ�y�������^����ԇ������ؓ����ֵ����������Lֵ������r�g�ȶ�����S�r�քeͨ�^�������ӿ���CPU��������CPU���Mһ���\�������ж���̎������Ȼ�����g�Y������RAM�Ђ��ã���CPU�ж�����Y������ԇ�Ӕ��ѣ��������CPU����ROM����������������O�������ˇҪ�y�ýY���M�нyӋ�\��������ø�헽yӋ�Y������Kͨ�^�����ӿڷքe�@ʾ�������ӡ��ӛ䛻���̖����PC�C�M����̖ӛ�̎������������Ա���Ϣ�������������
6����Դ����ϵ�y��ԓϵ�y�΄��ڹ�����늚��������Ӿ�·���ֵ������������Ʒ�|ֱ��Ӱ����C���ɔ_�������������Ӌ���ʴ_����Ҫ���������������pҕ��Ҫ�����
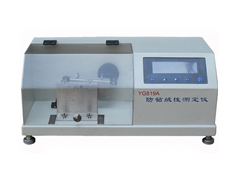
7����ι���������Q�ܼ���ӏ����Ĺ�����ʽ���ж�N��ͬ�Ĺ�����ʽ���ι����ʽ��朗l���u�ۡ��M�ӵȷ�ʽ���A�ַ�ʽ�֏���������≺��늴š��քӵ������A�ӏ�����ֱ�Ӝy�x��ͨ�^�y������������ֱ�Ӽ��d�ȷ�ʽ����
��ӆΏ��x��ϵ�y�Ĺ������̣���D����Dʾ2��ʾ����������Ӳ����ܛ���������Ѕf�{��ϵĽY������Ȼ���ڙC�Ͳ�ͬ����������ijЩ�������ſ��ܕ����в������D2��һ���ԅ�����
��ӆΏ��x�yԇ�{У���������������Ҫ�c��������������Ʌ������a����S���ṩ�����P�x���f�����������·�D�����P�l�ļ����g�����M�У����ď���������